Tehnoloogiast
Georadar on tänaseks laialdaselt tunnustatud ka kui efektiivne ja usaldusväärne tehnoloogia maa-aluste tehnovõrkude uuringute läbiviimiseks ning järjest rohkem riike on lisanud georadari oma maa-aluste taristute uuringute läbiviimise regulatsioonidesse. Georadari abil on võimalik saada uuritavast piirkonnast väga tõetruu ülevaade, kuna võrreldes elektromagnetilise trassiotsijaga, saadakse tuhandeid kordi rohkem mõõtmispunkte. Lisaks ei ole georadar nii tundlik välisele mürale ning suudab tuvastada maa-aluseid tehnovõrke ka piirkondades, kus need on tihedalt koos.
Georadar suudab tuvastada ka kõiki muid objekte, mis on erinevad teda ümbritsevast keskkonnast ning samuti ka erinevaid pinnase kihte. Täpsemalt öeldes mõõdab georadar raadiolaine liikumiskiirust, mis on erinevates materjalides erinev ning tänu sellele suudab eristada erinevaid objekte ja kihte.
Georadari põhikomponendid on juhtimisseade, antenn ja aku.
Juhtimisseade genereerib ja kontrollib elektromagnetiliste lainete impulsse. Juhtimisseadmes on üldjuhul ka sisseehitatud arvuti, mis võtab vastu tagasipeegeldunud impulsid, salvestab need ja teeb esmase töötluse. Enamus juhtimisseadmetel on ka ekraan, mille kaudu saab määrata georadari seadistusi ning jälgida uuringu andmeid reaalajas.
Georadari saatja antenn saadab maapinda elektromagnetilisi impulsse. See energia tungib sügavamale pinnasesse, kuid osa sellest energiast peegeldub tagasi objektidelt, mis erinevad pinnasest. Tagasipeegeldunud energia püütakse kinni vastuvõtja antenniga ning mõõdetakse selle intensiivsust ning aega, mis kulus tal pinnase läbimiseks.
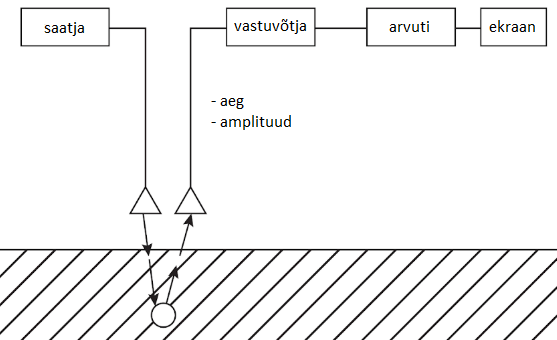
Joonis: Georadari tööpõhimõte
Selleks, et saada infot erinevatel sügavusel olevatest objektidest, kogub georadar ühes punktis järjest mitusada näitu elektromagnetlaine tagasipeegelduste kohta. Olenevalt georadaris olevast ostsilloskoopi tehnoloogiast saadetakse iga näidu saamiseks välja uus impulss (Equivalent-Time Sampling) või kogutakse kõik näidud ühe väljasaadetud impulsiga (Real-Time Sampling). Sellest tehnoloogiast sõltub georadari maksimaalne liikumise kiirus andmete kogumisel.
Kõikidest ühest punktist kogutud näitudest pannakse kokku skaneeringute kogum ehk A-skaneering.
A-skaneeringu järgi saab määrata selles konkreetses asukohapunktis (x, y) oleva tagasipeegeldunud laine parameetreid. Sellest saab olulist infot, kui võrrelda kõrvuti asuvate mõõtmispunktide parameetreid. Samuti on selle järgi võimalik näha kõikidel kõrgustel (z) oleva amplituudi tugevust ja polaarsust. Sõltuvalt uuringu ülesandest, kogutakse näite ja luuakse nendest A-skaneeringuid üldjuhul iga 1 – 5 cm tagant. Kõikidel georadaritel on võimalus seadistada, kas impulsse saadetakse maapinda automaatselt kindla vahemaa või aja järgi või manuaalselt.
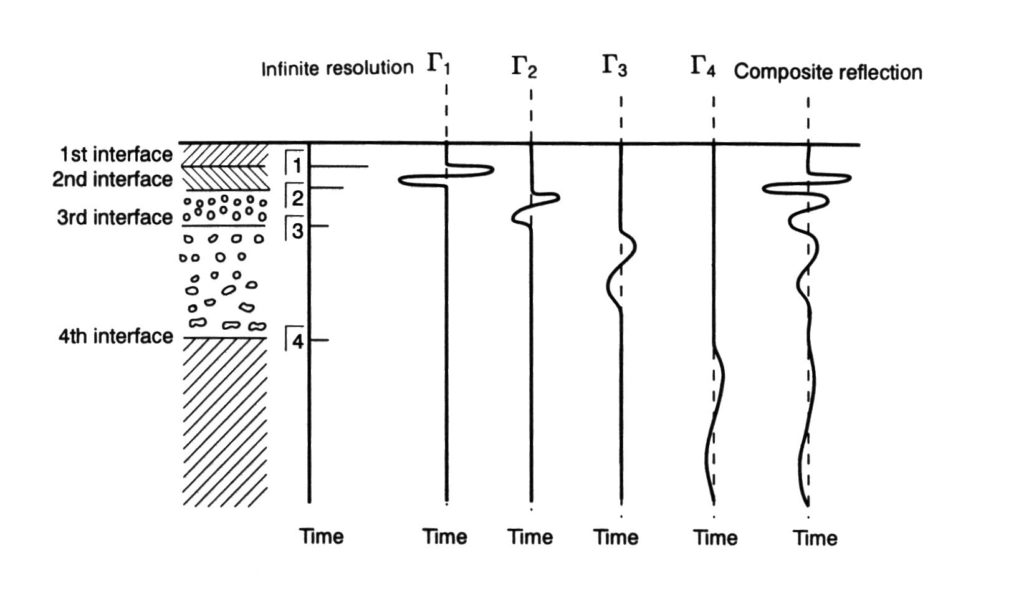
Joonis: A-skaneering (D. J. Daniels, 2004)
Georadari liikumisel maapinal ja A-skaneeringuid teineteise kõrvale seades saadakse elektriväljade maatriks ehk B-skaneering. B-skaneeringu järgi saab täpselt tuvastada ja positsioneerida sihtmärke. See on peamine meetod, kui soovitakse täpselt tuvastada maa-aluste kommunikatsioonide asukohta (x, y, z). Olenevalt lineaarse sihtmärgi (toru, kaabel vms) suunast võrreldes skaneerimisliiniga, on sihtmärk B-skaneeringul nähtav kas hüperboolina, osalise hüperboolina või eristuva joonena.
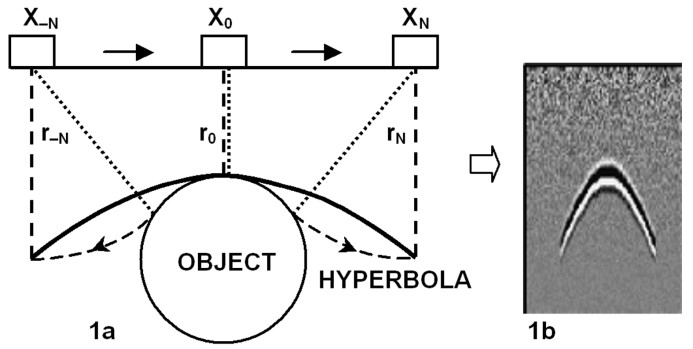
Joonis: B-skaneering (Ristic, 2009)
Seades kõrvuti kõik kogutud B-skaneeringud, moodustub nendest 3D maatriks ehk C-skaneering.
C-skaneering võimaldab teha lõikeid uuringualas nii horisontaalselt (time slice) kui vertikaalselt piki- ja ristisuunas. Tänu sellele tekib terviklik pilt sihtmärgi asukohast. Sihtmärgi täpse asukoha määramiseks kasutatakse üldjuhul erinevaid lõikeid samast piirkonnast.
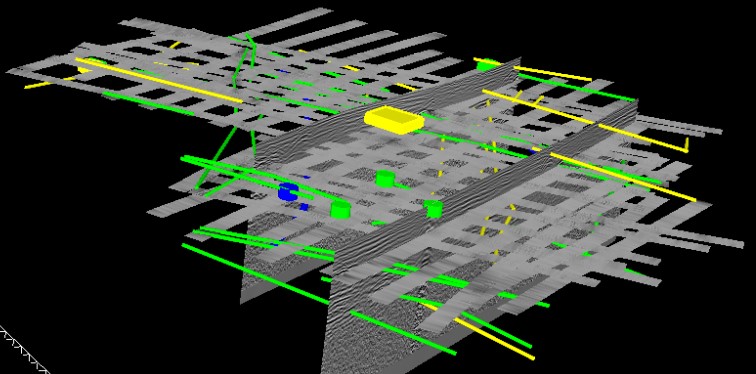
Joonis: C-skaneering 3D vaade
Kuna georadar on geofüüsikaline seade, siis mõjutavad tema tööd otseselt pinnase omadused:
- magnetiline vastuvõtlikus,
- elektrijuhtivus,
- dielektriline läbitavus.
Magnetiline vastuvõtlikkus mõjutab elektromagnetlaine võimekust levida, aga kuna seda on meie looduslikus pinnases vähe, siis see üldiselt ei mõjuta georadari tööd.
Pinnase elektrijuhtivus mõjutab otseselt elektromagnetlaine levikut ning sellega georadari tööd, kuna see põhjustab energiakadu. Tänu pinnase elektrijuhtivusele hajub georadarist välja saadetud energia erinevatesse suundadesse ning seda ei jää piisavalt järgi, et edasi sügavamale pinnasesse tungida. Selle tulemusena „ei näe“ georadar piisavalt sügavale. Väga hea elektrijuhtivusega on näiteks soolane vesi ja sellest tulenevalt ei saa georadariga koguda andmeid kohas, kus merevesi on pinnasesse tunginud. Samuti ei suuda georadar „näha läbi“ tihedast metallvõrgust või metallplaadist.
Pinnase dielektriline läbitavus on pinnase omadus, millele georadari töö suurel määral toetub.
See mõjutab pinnase sisemise takistusega ja peegeldusega kiirust, millega elektromagnetlaine pinnast läbib. Dielektriline läbitavus näitab, kui kiiresti suudab elektromagnetlaine antud pinnases liikuda.
Erinevatel materjalidel on erinev dielektriline väärtus ning seega suudab elektromagnetlaine levida neis erineva kiirusega:
| Materjal | dielektriline väärtus | laine kiirus max (m/ns) | laine kiirus min (m/ns) |
| õhk | 1 | 0,30 | 0,30 |
| jää | 4 | 0,15 | 0,15 |
| kuiv liiv | 4 kuni 6 | 0,15 | 0,12 |
| kruus | 4 kuni 7 | 0,15 | 0,11 |
| graniit | 5 kuni 7 | 0,13 | 0,11 |
| asfalt | 4 kuni 8 | 0,15 | 0,11 |
| saviliiv | 7 kuni 10 | 0,11 | 0,95 |
| betoon | 7 kuni 10 | 0,11 | 0,95 |
| kruusatee | 8 kuni 14 | 0,11 | 0,80 |
| möll | 16 kuni 30 | 0,08 | 0,06 |
| savi | 25 kuni 40 | 0,06 | 0,05 |
| turvas | 40 | 0,05 | 0,05 |
| vesi | 81 | 0,03 | 0,03 |
Tabel: Materjalide dielektriline väärtus ja elektromagnetlaine liikumise kiirus
Georadar mõõdab, kui palju aega kulub impulsil saatja antennist jõudmiseks sihtmärgini ning sealt tagasi peegeldumiseks vastuvõtja antennini.
Teades, milline on pinnase dielektriline läbitavus ning kui palju kulus impulsil aega sihtmärgini ja tagasi jõudmiseks, saab arvutada välja sihtmärgi kauguse (sügavuse) georadarist.
Georadariga saab kaardistada näiteks maa-alust tehnovõrgu asukohta ja sügavust, aga ei saa täpselt tuvastada, millise tehnovõrguga on tegemist. Sõltuvalt georadari tüübist, tarkvarast ja interpreteerija oskusest, on küll võimalik eristada kaablid torudest ning teha vahet metallist ja mittemetallist taristu vahel, kuid ei ole võimalik öelda näiteks, kas tegemist on nõrkvoolu, madalpinge või keskpinge kaabliga. Samuti ei ole võimalik tuvastada georadariga piisavalt täpselt maa-aluse tehnovõrgu suurust ja läbimõõtu.
Maa-aluste objektide paremaks tuvastamiseks vajab georadar otsest kontakti maapinnaga. Sellepärast ei soovitata georadarit kasutada paksu lumega või kõrge heinaga pinnasel. Georadariga saab kõige parema tulemuse kuiva ja liivase pinnasega ning see ei ole nii efektiivne märja ja savise pinnase puhul. Georadar suudab hästi „läbi näha“ ka betoonist. Sellegipoolest, kui betoonis olev metallist armatuurvõrk on tihedam kui georadari lainepikkus, siis sellest georadar „läbi ei näe“.
Georadari suutlikus objekte tuvastada sõltub kasutatavast antenni sagedusest.
Üldiselt jäävad maa-aluste tehnovõrkude tuvastamiseks ja kaardistamiseks kasutatavatel georadaritel lainesagedused 100 MHz ja 1000 MHz vahele ning betooni uuringuteks mõeldud georadaritel 1GHz ja 3GHz vahele. Geoloogias on kasutusel ka madalama sageduse 40Mhz – 100MHz sagedusega antennid.
Madalam sagedus suudab levida sügavamale. Näiteks 100 MHz sageduse antenniga georadar suudab näha kuni 5 meetri sügavusele, samas kui 1000 MHz sagedusega vähem kui 1 meetri sügavusele.
Kuna madalamal sagedusel on lainepikkus suurem, siis on resolutsioon madalam ning võimalik tuvastada ainult suuremaid objekte. Peenikesi kaableid või väikse läbimõõduga torusid ei ole võimalik näha madala sagedusega antenniga. Kõrgemal sagedusel on lainepikkus väiksem ja parem resolutsioon, mis võimaldab tuvastada ka väiksemaid objekte, peenemaid kaableid ja torusid.
Üle kolme meetri sügavusel olevaid tavalisi tehnovõrke ei ole üldjuhul siiski võimalik georadariga tuvastada.
Lisaks sagedusele mõjutab lainepikkust ja resolutsiooni pinnase dielektriline läbitavus. Mida kõrgem on pinnase dielektriline väärtus, seda väiksem on lainepikkus ning parem on resolutsioon.
| Antenni sagedus MHz | Maksimaalne sügavus meetrit | Õhk | Betoon | Kuiv pinnas | Tihendatud pinnas | Märg pinnas | |
| Dielektriline väärtus | 1 | 7 | 9 | 14 | 25 | ||
| Laine kiirus (m/ns) | 0,3 | 0,12 | 0,1 | 0,08 | 0,06 | ||
| 100 | 15 | Laine pikkus/ resolutsioon (m) | 3,00/0,75 | 1,20/0,30 | 1,00/0,25 | 0,80/0,20 | 0,60/0,15 |
| 200 | 7,5 | 1,50/0,38 | 0,60/0,15 | 0,50/0,13 | 0,40/0,10 | 0,30/0,08 | |
| 400 | 3,25 | 0,75/0,19 | 0,30/0,08 | 0,25/0,06 | 0,20/0,05 | 0,15/0,04 | |
| 1000 | 1,5 | 0,30/0,08 | 0,12/0,03 | 0,10/0,03 | 0,08/0,02 | 0,06/0,02 | |
| 1500 | 1 | 0,20/0,05 | 0,08/0,02 | 0,07/0,02 | 0,05/0,01 | 0,04/0,01 |
Tabel: Lainepikkus ja resolutsioon
Georadar suudab objekti asukohta määrata täpselt, kuna peegeldus saab tulla georadari vastuvõtu antennile ainult täpselt sihtmärgilt. See, millise täpsusega objekt tegelikult kaardistatakse sõltub positsioneerimisseadme täpsusest ning georadari andmete töötleja oskusest.
Näiteks suudab georadar maa-aluse tehnovõrgu sügavust määrata üldiselt +/- 10% täpsusega, sõltuvalt sellest, kui ühtlane on pinnas uuringu piirkonnas ja kui hästi suudetakse määrata pinnase dielektrilist väärtust. Oluline on meeles pidada, et georadar mõõdab sügavust sihtmärgi peale.
* Terminoloogiast: georadari eestikeelsed sünonüümid on maaradar ja pinnaseradar. Läänemaailm kasutab enamasti terminit GPR ehk Ground Penetrating Radar, uue põlvkonna seadmeid nimetatakse ka 3D GPR ja 3D Radar.